En Son Gelişmeler
Bu sitedeki videoların boyutları büyüktür. Görüntüleri görmek için Link'in üzerine gelin ve mouse'ın sağ tuşuna basın ve farklı kaydet (save as...) diyerek, bilgisayarınıza kaydediniz.
------------------------------------------------------------
*******************************************************************************
*** Almanya Regensburg öğrenci heyeti Eylül 2008 tarihinde İleri Robotik Laboratuvarımızı ziyaret etmişlerdir. Ziyarette yapılan sunumun VİDEOSU (14MB)
**********************************************************************************
*** Robotumuzun yürüme hareketi (Video 27MB) . İki adım arasında biraz bekletilme verilmiştir. Amaç bir adımdan diğerine geçişi görmektir.
-------------------------------------------------------------------------
*** Robot sağa sola salınım yaptırılmaktadır (Video 30MB). Bu deneyde robotun ağırlık merkezi sağa ve sola doğru kaydırılmaktadır. Bu deneyde kontrol sisteminin mükemmel derece iyi bir şekilde verilen eklem referanslarına gittiği görülmüştür.
-------------------------------------------------------------------------------
*** Robotumuzun ayaklarının zemine paralelliği önemlidir (Video 96MB ). Bu deney, robotun yürüme esnasında tek ayak üzerinde durduğunda, diğer ayağın herzaman zemine paralel olmasını sağlamak içindir. Robot askıdayken deney yapılmıştır. Bu nedenle bir ayağın eklemi oynatılırken diğer eklemlerde de hareket etmektedir (daha doğrusu sallanmakta/titreşmektedir) ve robotun sağ ayağı bu salınımı/titreşimi dahi algılamakta ve takip etmeye çalışmkatadır. Kontrol sistemi görevini yapmaktadır. Deney başarılıdır :::))) .
* Robtumuzun yeni resimleri (Resim1) ve (Resim2). Robotumuzun kablolarını biraz daha düzenledik ve yeni sensörler eklendi.
-----------------------------------------------------
Mart 2008: Robotumuzun ayakda durduğu video görüntüsü (140MB, önce sağ tuşla link'in üzerine gelip bilgisayarınıza kaydediniz). Resim1(Lab. da robotun devreleri sökülü halde). Resim2 (robotun eski hali, devreler çok).
Bu deneyde robot laboratuvarın zeminine indiriliyor. Sonra robot'a değişik yönlerden kuvvet uygulanıyor ve robotun bu bozucu etkilere karşı tepkisi görülmektedir. Biped robot Manipulator (kol şeklindeki sabit robotlar) dan farklı olduğundan, robotun ayaklarının zeminden kaymaması önemli. Bu nedenle ayaklarının altında küçük kauçuklar mevcuttur.
Robotun kalçasına 4 adet çelik kablo bağlıdır. Bunlar biraz gevşetiliyor ama tamamıyla robottan ayrılmıyor. Gevşetilme 10-15cm civarında dır. Ama yaılacak harekete göre gevşetilme miktarı değişmektedir.Bu kablolar olası bir hata da robotun zemine çarpıp hasar almasını engellemek içindir ve tüm dünyada yürüyen robotlarda uygulanan standart yöntemdir.
----------------------------------------------------------------------
11 Kasım 2007 Show Tv Ana haber bülteninde projemizle ilgili çıkan haber (Bunu Tıklayın). Bu görüntüyü yakalayan Yrd. Doç Dr. Gürol Demirbaş'a teşekkür ediyoruz.
Kasım 2007: Uzun zamandır sitemizi yenilemedik, özür dileriz. Robotu asmak için imal ettiğimiz bir yapı (Resim 1). Robotumuzun motorlarını sürmek için imal ettiğimiz guc elektronigi devresi. Maliyeti kismak ve cevremiz icin yeniden donusum olmasi açısından eski bilgisayar kasası kullandık(Resim 2).Aynı devrenin diğer yüzü(Resim 3). Robotumuz yeni asma aparatına baglı olarak yere ayak bastırıldığı an(Resim 4). Ben, Sabri ve Robot(Resim 5). Robotumuzun bazı kabloları bağlandığında (Resim 6). Balıkesirin sıcak Ağustos ayında, koltuğumda dinlenirken (Resim 7).Sabri lisans öğrencilerimizle(Resim 8)
Robotumuzun hareket videosu(Video) Not:. Windows internet explorer uyarı verebilir, Activex i kabul edin.
Bu videoyu açamayanlar olursa, işte codec(Bunu yukleyin)
Sosyal Etkinliklerimizde oldu:
Asos da Tüplü dalış yaptıktan sonra(Resim) (Resim).Ölü Müren balığı (Resim).
Asos a giderken(Resim) Dalış anı(Resim) . Denizin derinliklerinde (Resim) (Resim) (Resim) . Deniz yildizi (Resim). Dalistan sonra balikci kulubesinde (Resim).
Ben daliştan sonra (Resim)
Türk Milletinin Karakteri Yüksektir,
Türk Milleti Çalışkandır,
Türk Milleti Zekidir,
Ne Mutlu Türküm Diyene.
M. Kemal ATATÜRK. |
Mayis 2007: Robotumuzun bilgisayar kontrolu altindaki ilk video goruntusu (Video). Kontrol bilgisayarimiz.
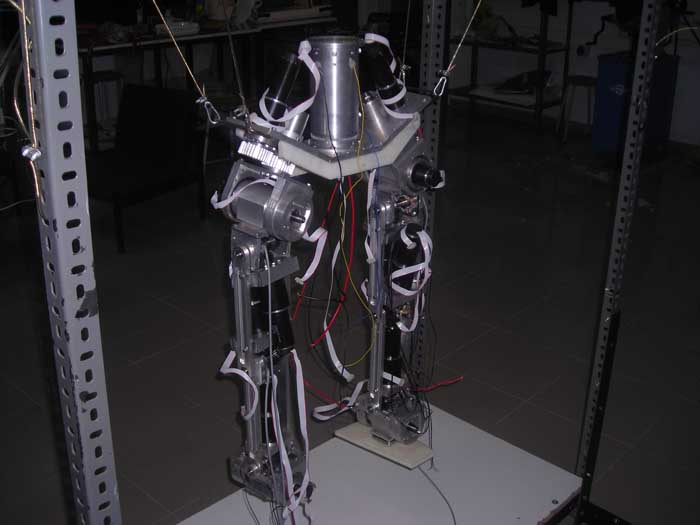
Mart 2007: Robotumuzun mekanik olarak %95'i tamamlandi.Resim1, Resim2, Resim 3 (Havadaki yoğun toz parçacıkları görünüyor).
Şubat 2007: Robotumuzun gövde altı tamamlandı. Gövde üzeride tamamlandıktan sonra, robotumuza elektronik devreler eklenecektir.
Ocak 2007: Laboratuvarımızdan kesitler.
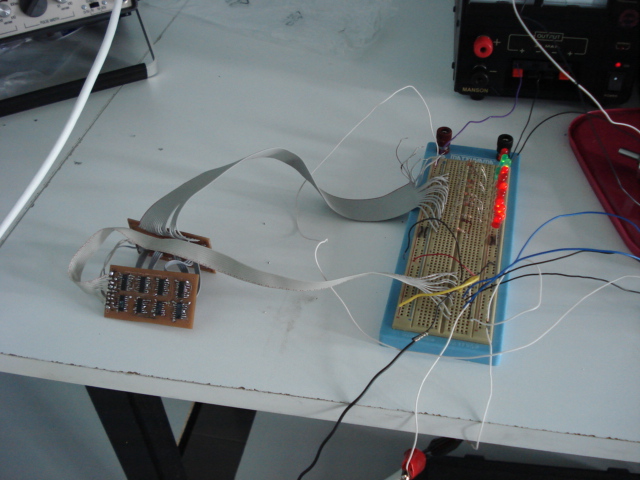
1) Sayıcı devremiz ve Motor. 2) Tasarlanan mekanik parça ve bilgisayarda modeli. 3) Ben Freze de çalışırken. 4)Arş. Gör. Sabri Bicakcı, delrin malzemeye vida dişi açarken
Laboratuvarı ve çalışmamızı gösteren video. |
| Aralık 2006: Robotumuzun mekanik parçalarını imalatına başlandı. Robotta imal edilmesi gereken yaklaşık 130 değişik parça var. Toplam imal idilmesi gerken parça sayısı ise 700 civari. Hazır alınan mekanik parçalarda göz önünde bulundurulduğunda (vida vs ler hariç tabiki ::)) ), yaklaşık 800 parça bir araya gelecektir. |
|
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}