
| Y³r³yen Robot: | Tekerlek veya palet yerine ayaklara sahip olan robotlardir. Bu t³r robotlar dogadaki canlilardan esinlenmislerdir. Genelde ayak sayisi 2, 4, 6 veya 8. Fakat ayak sayilari bunlarla sinirli degildir. |
| Biped Robot | Iki ayakli robotlara ve canlilara verilen isimdir. Bir biped robot ayni zamanda "insan'a" anatomic olarak benzerse buna "Anthropomorphic" veya "Humanoid" adi verilir. Dogadaki canlilardan "Tavuk" da bir biped'dir fakat Anthropomorphic degildir. 4 ayakli robotlara ise "Quadraped" adi verilir. |
|
|
Biped robot gonzalez. Salford ▄niversitesinde Ben ve danismanim G.A. Medrano-Cerda tarafindan dizayn edilmistir. Robot ÷ne arkaya, saga sola y³r³yebilmekte ve 5cm y³ksekligindeki merdivenleri inip ńkabilmektedir. Robot'un yaklasik maliyeti "30 000 $" dir. |
|
|
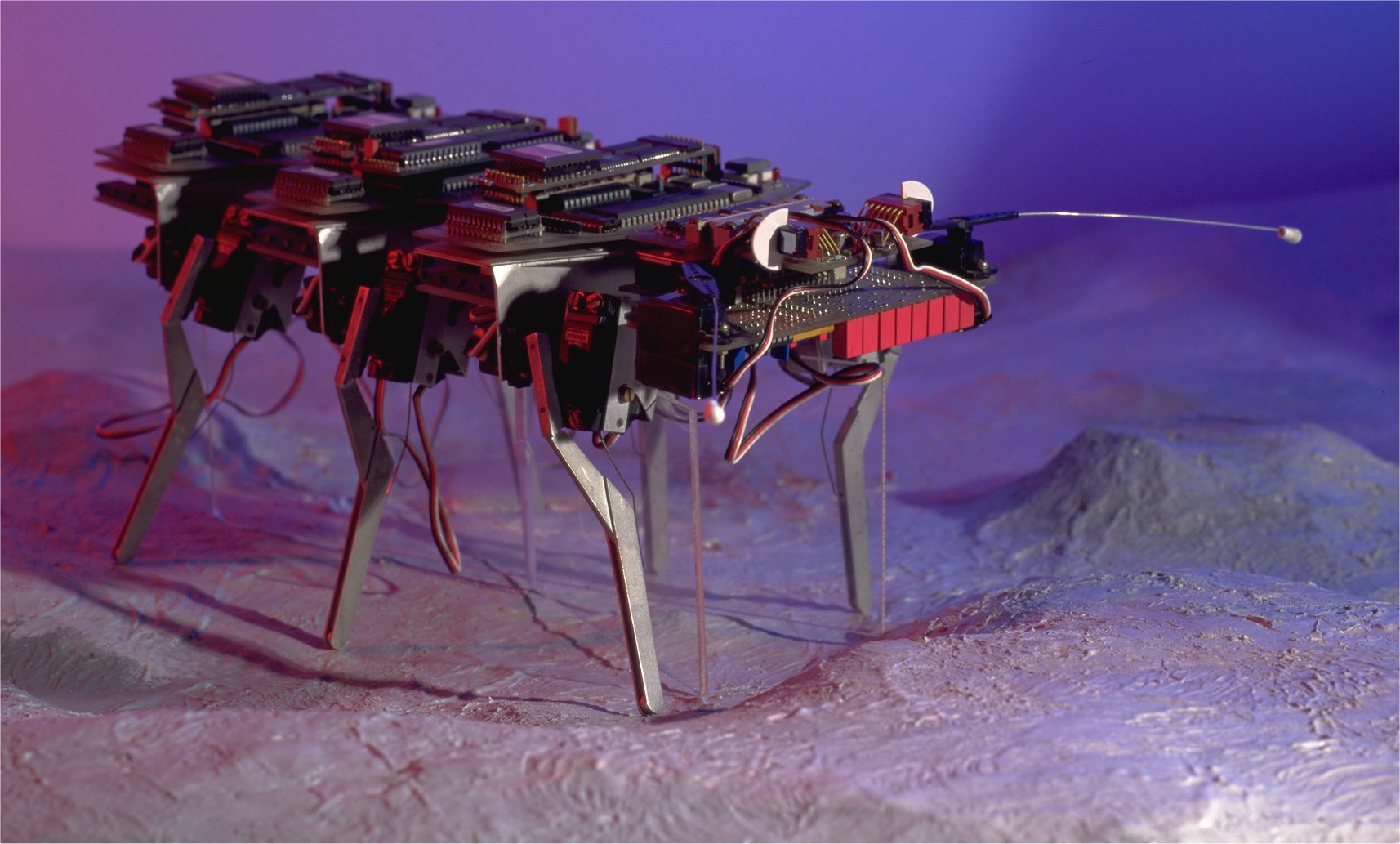
Hexapod robot Hector. Salford ▄niversitesinde Mr Downes tarafindan dizayn edilmistir. Robot ³ń parńadan olusmustur. Her ayak ńifti digerlerinden baginsiz hareket edebilmektedir. |
|
|
Honda firmasinin sponsorlugu ile yapilan "Honda Humanoid Robot". Arastirma 1986 yilinda basladi. O g³nden bu g³ne kadar birńok prototip ortaya cikmistir. Bunlar P1, P2 ve P3 gibi isimlendirilmistir. Soldaki resimde P3 g÷nmektedir. P3 ÷ne arkaya, saga sola y³r³yebilmekte ve merdivenleri inip cikabilmektedir. Robot'un yaklasik maliyeti "100 000 000 $" dir. |
Last updated on 13/12/2001